Zagadnienie dwóch ciał poruszających się pod wpływem
wzajemnego przyciągania grawitacyjnego można łatwo sprowadzić do zagadnienia
ruchu względnego (patrz Dodatek). Zamiast dwóch wektorów położenia r1
i r2 posługujemy się wektorem położenia względnego
![]() .
.
Równanie ruchu przyjmuje postać
![]() (1)
(1)
gdzie μ oznacza masę zredukowaną:
![]() (2)
(2)
Zagadnienie sprowadzone zostało formalnie do ruchu jednego ciała o masie μ. Warto zauważyć, że w przypadku gdy jedna z mas jest znacznie mniejsza od drugiej (np. ruch planety wokół Słońca), masa zredukowana jest praktycznie równa tej mniejszej masie.
Łatwo sprawdzić, że w zagadnieniu jednego ciała zachowany jest moment pędu
![]() (3)
(3)
Różniczkując otrzymujemy bowiem (dalej zamiast oznaczeń M1, M2 używamy M,m)
![]()
Wektor J jest zatem stały co do wartości i kierunku.
Oznacza to, że ruch jest płaski i zachodzi w płaszczyźnie prostopadłej do J.
Położenie cząstki na tej płaszczyźnie opisać możemy za pomocą współrzędnych
biegunowych ![]() Wprowadzając wersory
Wprowadzając wersory
rys. 1
![]() jak na rys. 1, prędkość przedstawić możemy następująco
jak na rys. 1, prędkość przedstawić możemy następująco
![]()
ponieważ ![]() jest prędkością kątową. Moment pędu równy jest
jest prędkością kątową. Moment pędu równy jest
![]() (4)
(4)
gdzie ![]() oznacza wektor jednostkowy
oznacza wektor jednostkowy ![]() prostopadły do płaszczyzny ruchu.
prostopadły do płaszczyzny ruchu.
Łatwo sprawdzić, że moment pędu
jest proporcjonalny do szybkości zakreślania pola przez wektor wodzący ![]() Pole ∆S zakreślane w czasie ∆t
równe jest bowiem, jak widać z rysunku 2,
Pole ∆S zakreślane w czasie ∆t
równe jest bowiem, jak widać z rysunku 2,
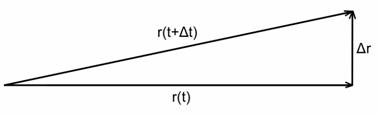
Rys. 2
![]() .
.
Mamy więc
i w granicy ∆t®0
![]() .
.
Moment pędu (3) równy jest zatem co do wartości
![]() .
(4’)
.
(4’)
Zachowanie momentu pędu
oznacza, że szybkość zakreślania pola jest stała. Inaczej mówiąc, w jednakowych
odstępach czasu wektor ![]() zakreśla jednakowe pola. Wniosek ten nazywa się II prawem
Keplera. Rys. 3 przedstawia II prawo Keplera w przypadku orbity eliptycznej.
zakreśla jednakowe pola. Wniosek ten nazywa się II prawem
Keplera. Rys. 3 przedstawia II prawo Keplera w przypadku orbity eliptycznej.
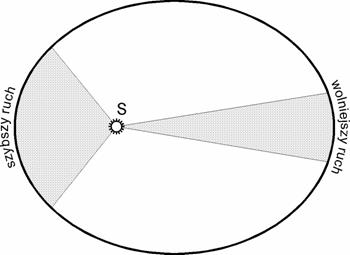
Rys. 4. Zaznaczone pola są jednakowe i odpowiadają jednakowym czasom.
Jeśli ![]() , to istnieje punkt, w którym odległość ciała od centrum siły
jest minimalna. Możemy wybrać oś Ox tak, aby pokrywała się z kierunkiem
perihelium ciała (por. rys. 5).
, to istnieje punkt, w którym odległość ciała od centrum siły
jest minimalna. Możemy wybrać oś Ox tak, aby pokrywała się z kierunkiem
perihelium ciała (por. rys. 5).
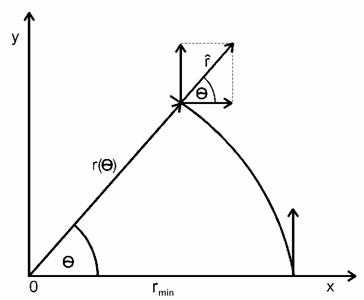
Rys. 5
Równanie ruchu (1) możemy przekształcić korzystając z definicji prędkości:
![]()
do postaci:
![]()
Lewą stronę ostatniego równania można zapisać
![]()
Jeśli skorzystać z wyrażenia (4) na moment pędu:
![]()
i podstawić ![]() do równania ruchu, dostaniemy
do równania ruchu, dostaniemy
![]()
a po uproszczeniu
![]() (5)
(5)
Dalej, jak widać z rysunku 5
![]() .
.
Równanie (5) oznacza więc, że
![]()
![]()
 (5’)
(5’)
Wyrażenie w nawiasie jest stałe, więc całkowanie tego układu jest trywialne:
![]()
 (6)
(6)
C jest stałą całkowania oraz uwzględniamy, że zgodnie z rysunkiem 5 vx(0) = 0.
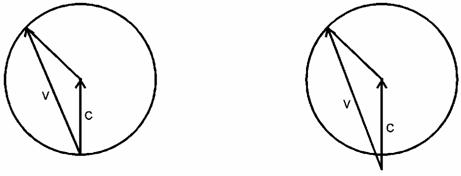
Równania (6) i możliwe
przypadki ruchu ciała można przedstawić graficznie. Jeśli wektor [O, C]
oznaczymy przez C, to łatwo sprawdzić, że długość wektora ![]() jest stała i równa
jest stała i równa ![]() . Oznacza to, że koniec wektora v leży zawsze na
okręgu. Możliwe sytuacje przedstawia rys. 6.
. Oznacza to, że koniec wektora v leży zawsze na
okręgu. Możliwe sytuacje przedstawia rys. 6.
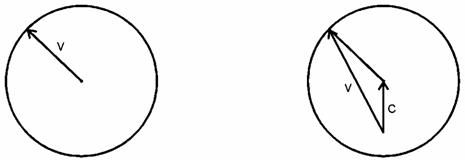
C =
0
![]()
![]()
![]()
Rys. 6
Obliczając teraz momentu pędu, równy swej z – owej składowej Jz, mamy
![]()
Po podstawieniu związków (6) otrzymujemy
![]()
Obliczając stąd r mamy
Jest to znane z geometrii analitycznej równanie biegunowe stożkowej, centrum sił znajduje się w jej ognisku,
![]()
gdzie e oznacza mimośród, a p parametr. Zatem torem ciała jest jedna z krzywych stożkowych: elipsa, parabola bądź hiperbola. Jest to treść I prawa Keplera.
Porównując dwa ostatnie równania otrzymujemy parametr i mimośród stożkowej w postaci:
![]() (7a)
(7a)
![]() (7b)
(7b)
Łatwo zauważyć, że cztery sytuacje przedstawione na rysunku 6 odpowiadają zgodnie z równaniem (7b) różnym wartościom mimośrodu orbity e. Mamy kolejno: okrąg (e=0), elipsę (e<1), parabolę (e=1) oraz hiperbolę (e>1).
Z powyższych rozważań możemy też wyprowadzić III prawo Keplera. W tym przypadku zakładamy, że orbita jest elipsą. Z równania (4’) mamy:
![]() .
.
Z kolei z prawa pól wynika, że
![]() .
.
Porównując oba równania i podnosząc do kwadratu otrzymujemy
![]() .
(8)
.
(8)
Ponieważ
b2 = a2(1-e2) = ap
równanie (8) przyjmuje postać
![]() .
.
Podstawiając do ostatniego równania wyrażenie (7a) na parametr p:
![]() ,
,
otrzymujemy
![]() ,
,
czyli
![]() .
.
Jest to III prawo Keplera.
Rys. 7
Dla dwóch jednorodnych ciał kulistych działających na siebie siłami grawitacji równania ruchu mają postać:
![]()
![]()
gdzie ![]()
Po dodaniu obu równań stronami otrzymujemy
![]()
Powtyższe równanie przedstawia zasadę zachowania pędu całego układu, ponieważ po jego obustronnym zcałkowaniu otrzymamy
![]() (9)
(9)
gdzie lewa strona przedstawia całkowity pęd układu.
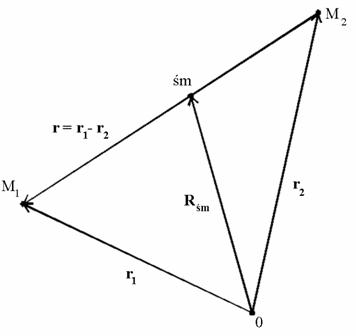
Położenie środka masy określa wzór
![]()
Różniczkując jego obie strony względem czasu otrzymamy
![]()
Z równania (9) otrzymujemy, że ![]() co oznacza, że środek masy porusza się ze stałą prędkością.
Można zawsze dobrać inercjalny układ odniesienia, w którym ta prędkość jest
równa zeru.
co oznacza, że środek masy porusza się ze stałą prędkością.
Można zawsze dobrać inercjalny układ odniesienia, w którym ta prędkość jest
równa zeru.
Jeśli równania ruchu przekształcimy do postaci
![]()
![]()
i odejmiemy stronami otrzymamy

To równanie zawiera tylko jeden wektor ![]() .
.
Po wprowadzeniu masy zredukowanej μ zdefiniowanej wzorem:
![]()
ostatenie równanie przyjmie postać
![]()
W ten sposób zagadnienie dwóch ciał wymagające wyznaczenia
dwóch wektorów ![]() ,
, ![]() zostało sprowadzone do zagadnienia jednego ciała, w którym
należy wyznaczyć zależność jednego wektora r od czasu. Ruch ciała
zostało sprowadzone do zagadnienia jednego ciała, w którym
należy wyznaczyć zależność jednego wektora r od czasu. Ruch ciała ![]() określamy względem
określamy względem ![]() .
.